

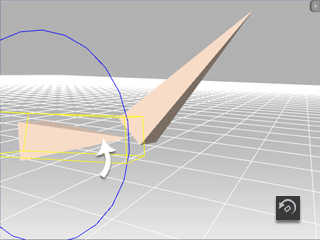
Gewählter Endeffektor
Alle Knotenpunkte in der Bewegungskette werden durch die Verschiebung beeinflußt
Die Inverse Kinematik basiert auf mathematischen Gleichungssystemen, die zur Simulation gelenkartig verbundener Systeme dienen. Dieser Ansatz entstammt der Robotik, die schon früh mit der Problemstellung der exakten Positionierung von Greifarmen und Werkzeugen konfrontiert wurde. Im Bereich der Animation dient sie zur Simulation der mechanischen Bewegungsabläufe des menschlichen Skelettes.
Bei der inversen Kinematik wird das letzte Glied der kinematischen Kette, der sogenannte Endeffektor, bewegt und in die gewünschte Lage gebracht. Die übrigen Glieder der Kette müssen dann entsprechend den Freiheitsgraden ihrer Gelenke passende Lagen einnehmen.
IK stellt dar, wie der Endeffektor bei der Bewegung alle Orientierungswerte und Positionen des übergeordneten Knotenpunktes beeinflußt.
|
|
|
|
Gewählter Endeffektor |
Alle Knotenpunkte in der Bewegungskette werden durch die Verschiebung beeinflußt |
Bei der Vorwärts-Kinematik bestimmt das Elternobjekt die Bewegung des Kindobjektes

|
|
|
Elternobjekt |
Die Verschiebung beeinflußt nur das Elternobjekt. |